


Projekt Entwicklung verteilter kontextbasierter Anwendungen
iRobot Roomba 650 + RooWifi
 |
Der iRobot Roomba 650 ist ein Staubsaugerroboter, welcher über die RooWifi-Schnittstelle per WLAN gesteuert werden kann. Auf diese Weise lässt sich der Roomba fernsteuern und die Sensordaten auslesen.
Siehe auch: Besondere Herausforderungen
|
Philips Hue - intelligente Glühbirnen
 |
Die intelligenten Glühbirnen der Hue-Serie lassen sich über eine Bridge im lokalen Netzwerk (und ggf. auch über das Internet) steuern. Die Bridge bietet ein REST-Interface, welches alle Funktionen der Glühbirnen offen legt. So ist es z.B. möglich die Lampen ein- und auszuschalten, fast stufenlos zu dimmen und in nahezu beliebige Farben aus dem RGB-Farbspektrum leuchten zu lassen.
Siehe auch:
Besondere Herausforderungen
|
Flower Power - Pflanzensensor
 |
Der Flower-Power-Pflanzensensor kann die Umweltbedingungen einer Pflanze wahrnehmen. Hierzu verfügt er über Sensoren zum Messen von Temperatur, Bodenfeuchtigkeit, Lichtintensität und Düngergehalt des Bodens. Die Sensoren können über Bluetooth LE abgefragt werden. Hierfür existieren ein nodeJS-Beispiel und eine eigens entwickelte Android-Bibliothek (siehe unten). Außerdem bietet der Hersteller Parrot Zugriff auf eine Datenbank mit tausenden von Pflanzeninformationen über eine REST-Schnittstelle.
Siehe auch:
Besondere Herausforderungen
|
Sensordrone
 |
Die Sensordrone ist ein Sensorsystem, welches eine Vielzahl von Sensoren beherbergt. Hierzu gehören: Temperatursensor, Barometer, ein Sensor zum Messen der Helligkeit und Farbintensität (RGB), Gassensoren für oxidierende sowie reduzierende Gase (z.B. Alkohol, Kohlenmonoxid, Propan, Erdgas, Ozon, Chlor, Stickstoffdioxid), ein CO_2-Sensor, ein Infrarotsensor zum berührungslosen Messen der Temperatur eines Objekts und ein kapazitiver Näherungsschalter mit dem sich z.B. Leitungen oder Balken in der Wand finden lassen. Der Zugriff auf die Sensoren erfolgt über Bluetooth LE.
Siehe auch:
Besondere Herausforderungen
|
SUNSpot - Sensoren
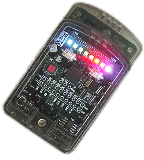 |
Ein SUNSpot-Sensor ist eine kleine Sensorplattform, welche einen Helligkeits- und Farbsensor, einen Temperatursensor, einen Beschleunigungssensor sowie zwei Druckknöpfe und 8 Farb-LEDs besitzt. Zusätzlich finden sich auf der Plattform eine 180 MHz CPU, 512 KB RAM und 4 MB Flash-Speicher sowie ein proprietäres Funkmodul.
Auf der Plattform lassen sich eigene Java ME-Programme ausführen. Auf diese Weise lassen sich die Sensoren abfragen und die LEDs ansteuern. Die Kommunikation über das Funkmodul erfolgt über normale Java Sockets. Wir besitzen insgesamt drei SUNSpots, von denen zwei über eine eigene Batterie verfügen. Der dritte wird per USB an einen Host-Computer angeschlossen. Bei Inbetriebnahme der SunSPOTs bilden diese ein ad-hoc Multihop-Netzwerk und können untereinander sowie mit normalen Java-Programmen auf dem Host-Computer kommunizieren. Siehe auch: Besondere Herausforderungen
|
Scosche Rhythm+ Herzfrequenzmessgerät
 |
Dieser Herzfrequenzmesser lässt sich sowohl am Handgelenk als auch am Unter- und Oberarm tragen. Er misst die Herzfrequenz mittels optischer Sensoren und überträgt die Messung per Bluetooth LE an ein anderes Gerät (z.B. ein Smartphone).
Siehe auch: Besondere Herausforderungen
|
Lego Mindstorms
 |
Lego-Mindstorm-Roboter basieren auf Bausteinen der Lego-Technic-Serie, die zusammen mit einem "intelligenten" Baustein (sog. NXT) vielfältige Konstruktionen (Laufende Roboter, Fahrzeuge, Fabrikelemente) erlauben. Der NXT besitzt eine 48 MHz-CPU, 64 KB RAM sowie 256 KM Flash-Speicher, zudem einen Bluetooth 2-Chip, einen USB-Port, einen (schlechten) kleinen Lautsprecher sowie eine 100 x 64 px Anzeigefläche. Ausserdem hat der NXT drei Motorausgänge, um Schrittmotoren anzuschließen, sowie vier Sensoreingänge, um z.B. Farbsensor, Ultraschallsensor oder Berührungssensor anzuschließen.
Wir haben 2 Mindstorm-Bausätze, auf denen eine leJOS-Firmware (siehe unten) läuft. So können per USB kleine Java-Programme (Java Micro Edition) auf den NXT gespielt und dort ausgeführt werden. Auf diese Weise lassen sich lokal Sensoren auslesen und Motoren ansteuern. Alternativ existiert ein eigens entwickeltes Framework, welches die Abfrage und Steuerung aus der Ferne über Bluetooth ermöglicht. Siehe auch: Besondere Herausforderungen
|
Muse Headband
 |
Das Muse Headband ist ein mobiles EEG (Elektroenzephalograf) zum Messen der Gehirnaktivitäten. Es verwendet insgesamt 7 verschiedene Sensoren, um Aktivitäten in verschiedenen sog. Bändern (Alpha-, Beta-, Gamma-, Delta- und Theta-Band), die unterschiedlichen mentalen Zuständen (Schlaf, Entspannung, Konzentration etc.) entsprechen, aufzuzeichen. Ein Beschleunigungssensor misst zudem die Neigung des Kopfes und detektiert das Blinzeln der Augen. Alle Daten werden per Bluetooth LE an ein Smartphone übertragen.
Siehe auch: Besondere Herausforderungen
|
iBeacon
| |
Der Markenname iBeacon ist ein 2013 von Apple Inc. eingeführter, proprietärer Standard für Navigation in geschlossenen Räumen, basierend auf Bluetooth Low Energy (BLE). Das Verfahren wird ab iOS 7 bzw. Android Version 4.3 unterstützt und kann somit ab dem iPhone 4S sowie aktuellen Android-Geräten genutzt werden.
Siehe auch: Besondere HerausforderungenIndoor-Navigation mit iBeacons ist nicht trivial, da:
|
DIJ Phantom 3 Advanced
 |
Die Phantom 3 ist ein Quadrokopter, welcher über eine HD Front- und eine Bodenkamera, eine elektronische Flughilfe, mittels derer der Quadrokopter relativ einfach gesteuert werden kann, sowie eine Reihe von Sensoren (Gyroskop, Accelerometer, Druckfühler, Ultraschall) verfügt.
Die Kommunikation mit dem Quadrokopter, d.h. das Senden von Steuerungs- und Konfigurationsbefehlen sowie der Empfang von Sensordaten und dem Videostrom, erfolgt über ein Android/iOS-SDK des Herstellers. Siehe auch: Besondere Herausforderungen
|
ARDrone 2
 |
Die ARDrone 2 ist ein low-cost Quadrokopter, welcher über eine HD Front- und eine Bodenkamera, eine elektronische Flughilfe, mittels derer der Quadrokopter relativ einfach gesteuert werden kann, sowie eine Reihe einfacher Sensoren (Gyroskop, Accelerometer, Druckfühler, Ultraschall) verfügt.
Die Kommunikation mit dem Quadrokopter, d.h. das Senden von Steuerungs- und Konfigurationsbefehlen sowie der Empfang von Sensordaten und dem Videostrom, erfolgt über eine WLAN-Verbindung. Das YADrone-Rahmenwerk bietet Java-Programmierern eine high-level API zur Interaktion mit dem Quadrokopter. Siehe auch:
Besondere Herausforderungen
|